新青年杂志
新青年杂志一文解析伺服系统CN1接口的DI/DO端子功能
前言
本文详细深入的介绍了伺服系统CN1接口的DI(数字量输入)和DO(数字量输出)端子功能定义、逻辑选择原理、硬件接线规范,明确了各端子的功能分类、参数关联及典型应用场景,重点辨析了易混淆功能的核心差异,并强化了安全功能的设计逻辑。文稿适用于汇川IS620P等系列脉冲型伺服系统,其他品牌(如松下、三菱、西门子)伺服系统可参考本规范,具体功能需结合对应品牌用户手册调整参数。
本文可为电气设计工程师、设备调试人员及故障排查人员提供标准化技术支持。
伺服系统DI输入端子篇
一、数字量输出DO端子的功能选择
Part.1
1:功能选择
(上下滑动即可查看全表格)
| 功能西文简称 | 西文 全名 |
功能 分类 |
功能 说明 |
核心关联/应用场景 |
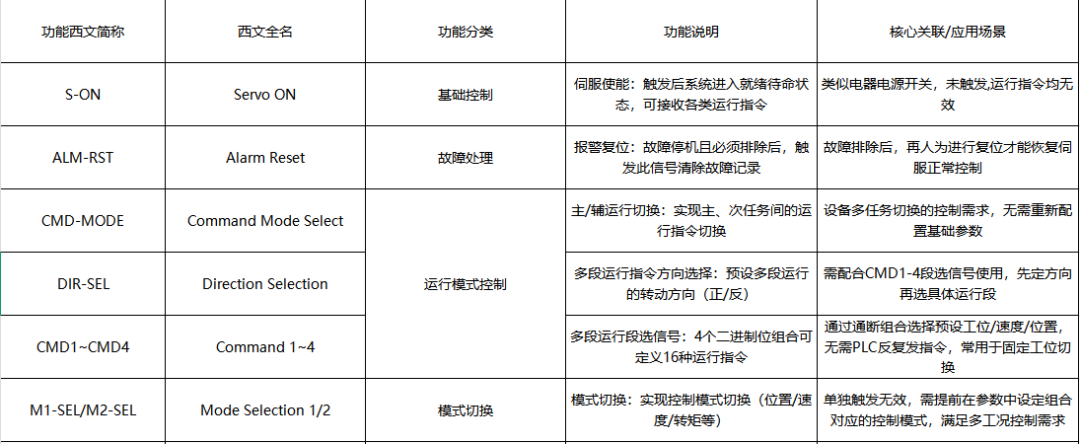
| S-ON | Servo ON | 基础控制 | 伺服使能:触发后系统进入就绪待命状态,可接收各类运行指令 | 类似电器电源开关,未触发,运行指令均无效 |
| ALM-RST | Alarm Reset | 故障 处理 |
报警复位:故障停机且必须排除后,触发此信号清除故障记录 | 故障排除后,再人为进行复位才能恢复伺服正常控制 |
| CMD-MODE | Command Mode Select | 运行模式控制 | 主/辅运行切换:实现主、次任务间的运行指令切换 | 设备多任务切换的控制需求,无需重新配置基础参数 |
| DIR-SEL | Direction Selection | 多段运行指令方向选择:预设多段运行的转动方向(正/反) | 需配合CMD1-4段选信号使用,先定方向再选具体运行段 | |
| CMD1~CMD4 | Command 1~4 | 多段运行段选信号:4个二进制位组合可定义16种运行指令 | 通过通断组合选择预设工位/速度/位置,无需PLC反复发指令,常用于固定工位切换 | |
| M1-SEL/M2-SEL | Mode Selection 1/2 | 模式切换 | 模式切换:实现控制模式切换(位置/速度/转矩等) | 单独触发无效,需提前在参数中设定组合对应的控制模式,满足多工况控制需求 |
| POS-INH | Position Inhibit | 位置控制 | 位置指令禁止:伺服不再接收新位置指令,但已执行指令会继续完成 | 定位过程中临时锁定位置,防止新指令干扰当前工位 |
| POS-EN | Position Enable | 多段位置指令使能:启用后可调用预设的多段位置参数 | 类似电动窗帘的预设档位,可快速切换全开/半开/全关等固定工位 | |
| ZCLMP | Zero Clamp Enable | 零位固定使能:伺服通过定子的磁场锁住转子,且确认当前位置为零位 | 用于精准定位后的位置保持,保障工位固定精度 | |
| P-OT/N-OT | Positive/Negative Over Travel | 安全保护 | 正/负过冲行程保护:检测到机械极限位置时触发,防止设备超程损坏 | 相当于机械限位的电气保护,避免机构因超行程发生碰撞 |
| EMG | Emergency Stop | 紧急停机:最高优先级信号,触发后立即切断电机电源,电机自由停车 | 用于突发险情的紧急避险,避免设备和人员安全事故 | |
| VEL-LIM | Velocity Limit Source | 内部速度限制源:触发后按内部预设上限限制电机最大转速 | 忽略外部速度限制指令,保障电机在安全转速范围内运行,防止超速损坏 | |
| P-TL/N-TL | Positive/Negative Torque Limit | 正向/负向外部转矩限制:限定对应方向的转矩上限 | 防止转矩过大导致传动机构或工件的损坏,保障设备机械或工件的结构安全 | |
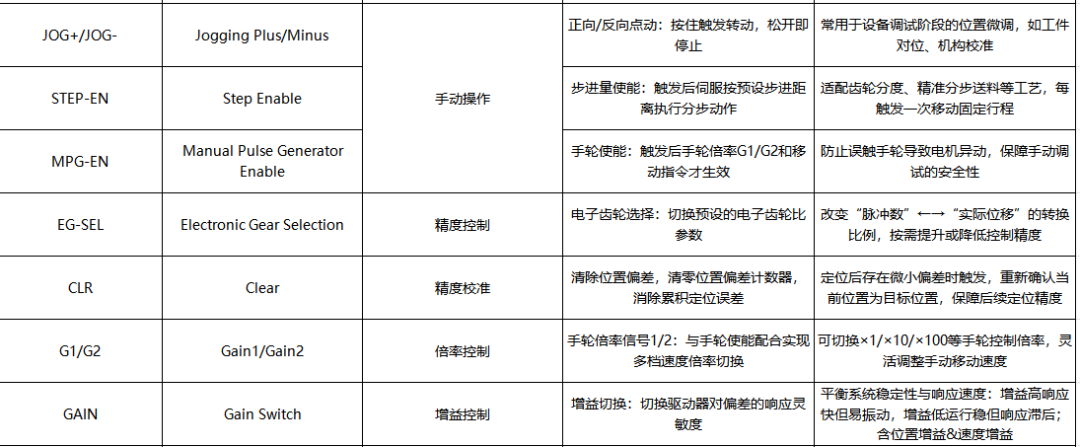
| JOG+/JOG- | Jogging Plus/Minus | 手动 操作 |
正向/反向点动:按住触发转动,松开即停止 | 常用于设备调试阶段的位置微调,如工件对位、机构校准 |
| STEP-EN | Step Enable | 步进量使能:触发后伺服按预设步进距离执行分步动作 | 适配齿轮分度、精准分步送料等工艺,每触发一次移动固定行程 | |
| MPG-EN | Manual Pulse Generator Enable | 手轮使能:触发后手轮倍率G1/G2和移动指令才生效 | 防止误触手轮导致电机异动,保障手动调试的安全性 | |
| EG-SEL | Electronic Gear Selection | 精度控制 | 电子齿轮选择:切换预设的电子齿轮比参数 | 改变“脉冲数”←→“实际位移”的转换比例,按需提升或降低控制精度 |
| CLR | Clear | 精度校准 | 清除位置偏差,清零位置偏差计数器,消除累积定位误差 | 定位后存在微小偏差时触发,重新确认当前位置为目标位置,保障后续定位精度 |
| G1/G2 | Gain1/ Gain2 |
倍率 控制 |
手轮倍率信号1/2:与手轮使能配合实现多档速度倍率切换 | 可切换×1/×10/×100等手轮控制倍率,灵活调整手动移动速度 |
| GAIN | Gain Switch | 增益控制 | 增益切换:切换驱动器对偏差的响应灵敏度 | 平衡系统稳定性与响应速度:增益高响应快但易振动,增益低运行稳但响应滞后;含位置增益&速度增益 |
| TRQ-DIR | Torque Direction | 指令方向控制 | 转矩指令方向设定:在转矩模式下定义转矩输出方向 | 适配压合、拧紧等工艺,如正转夹紧、反转松开的转矩方向控制 |
| SPD-DIR | Speed Direction | 速度指令方向设定:在速度模式下定义电机转动方向 | 单独设定速度控制的转向,满足单向调速的工艺需求 | |
| POS-DIR | Position Direction | 位置指令方向设定:在位置模式下定义趋近目标位置方向 | 保障定位动作按预设路径执行,避免反向走位影响精度 | |
| INT-CLR | Interruption Clear | 中断 控制 |
解除中断定长:中断任务在进行,执行退出中断模式,继续完成剩余行程 | 定长加工中临时中断(如工件检查、突发暂停)后,需“断点续传”完成剩余加工 |
| INT-INH | Interruption Inhibit | 禁止中断定长:中断任务未产生,阻止中断功能生效,屏蔽中断事件 | 高精度连续加工(如长行程磨削、齿轮分度),需避免非必要中断干扰流程 | |
| ORG-SW | Origin Switch | 高级功能 | 原点开关;检测机械原点位置的传感器信号 | 为回零动作提供位置基准,保障原点定位的准确性;ORG-SW& ORG-EN配合使用 |
| ORG-EN | Origin Return Enable | 原点复归使能:触发后启动自动回原点功能 | 实现设备开机或工位重置后的原点校准,保障后续定位基准统一 | |
| PUL-INH | Pulse Inhibit | 指令 屏蔽 |
脉冲指令禁止:直接阻断脉冲信号接收,电机停止响应位置/速度控制 | 比POS-INH更直接,快速屏蔽所有脉冲类控制指令(如紧急情况下的指令切断) |
由于表格内容实比较丰富也给大家截图方便观看,点击图片即可放大)
注:西文简称可以作为伺服接线的线码管的标识信息
安全端子使用要点:
急停(EMG)需采用双回路NC接线方式,通过硬线直接切断电机动力电源(驱动器控制电源需保持通电,以维持状态监控),禁止仅通过软件逻辑处理急停功能;
限位(P-OT/N-OT)端子逻辑选择优先设为高电平有效,线路断线(迎合《熵增定律》)时可自动触发保护,避免设备因信号丢失导致超程;
接线时需统一信号的类型,共阴/共阳不可混接(PNP信号对应共阴接线,NPN信号对应共阳接线),否则可能导致DI输入端子对应的光耦无法激发,进而端子功能入死局。
易混淆DI功能对照表
| 易混 淆功能 |
核心区别 | 适用场景 |
| GAIN 增益切换 |
切换位置/速度环增益参数组,优化系统响应速度与稳定性 | 自动运行时不同工况切换(如高速定位/重载平稳运行) |
| G1/G2 手轮倍率 |
切换手轮控制速度倍率(×1/×10/×100等),仅影响手动操作速度 | 手动调试时调整移动速度(精细对位/快速移动) |
| POS-INH 位置指令禁止 |
不接收新位置指令,但之前的指令会继续直至完成 | 定位过程中临时锁定工位(如工件检测) |
| PUL-INH 脉冲指令禁止 |
直接阻断脉冲信号:电机立即停止响应所有位置/速度指令 | 紧急情况下快速屏蔽所有脉冲类控制指令 |
| INT-CLR 解除中断 |
中断发生后触发,恢复原任务并完成剩余行程 | 临时中断(如工件检查)后需“断点续传”,避免运行又从头开始 |
| INT-INH 阻止中断 |
中断未发生前触发,屏蔽所有中断事件 | 中断还没发生→提前开INT-INH的‘防护盾’→任何中断信号都进不来,保证任务从头到尾连续干 |
(二)逻辑选择
Part.2
DI 数字量输入端子的逻辑选择包含 5 种类型:0 = 低电平有效、1 = 高电平有效、2 = 上升沿有效、3 = 下降沿有效、4 = 上升沿 + 下降沿有效。本文重点讨论工业场景中最常用的低电平有效与高电平有效。
(OC:Optocoupler,光耦,以下简称 OC)。
驱动器上电后,依赖内部软硬件协同作用实现相关的端子逻辑,见示意图DI-01
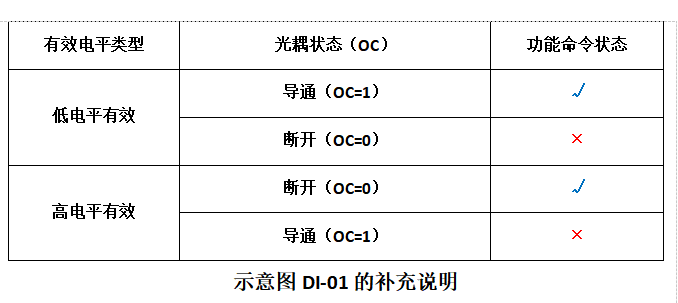
一、0 = 低电平有效:当Hardware的 DI1 端子关联的光耦 OC=1(导通状态)时,该端子定义的功能命令生效;OC=0(断开状态)时,功能命令无效。
示意图DI-01左侧:端子逻辑选择是低电平有效, DI1的OC=0,正向限位P-OT没有激发,正向限位信号为假(False)未触发保护;OC=1,正向限位P-OT被激发,正向限位信号为真(True),触发保护。
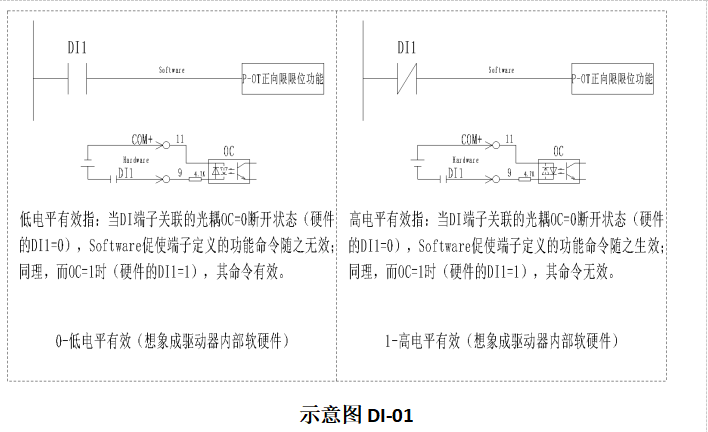
二、高电平有效:当DI1 端子关联的光耦 OC=0(断开状态)时,功能命令生效;OC=1(导通状态)时,功能命令无效。
示意图DI-01补充:端子逻辑选择是高电平有效, DI1的OC=0,正向限位P-OT已被激发,正向限位信号为假(True)触发保护;OC=1,正向限位P-OT被激发,正向限位信号为真(False),未触发保护。
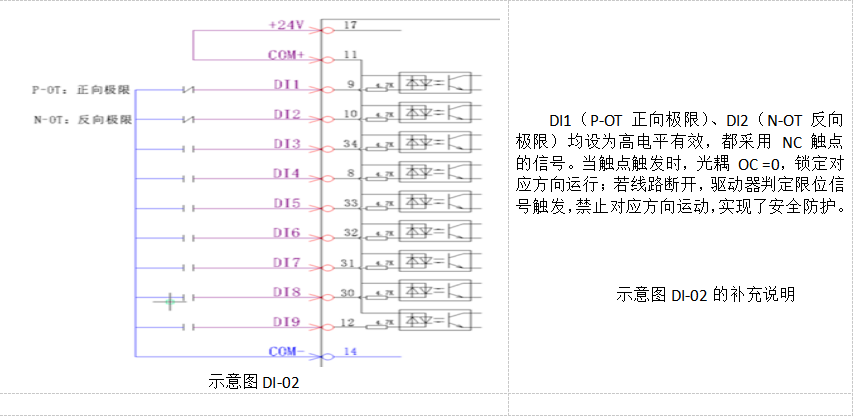
三、 为了增强对高电平输入有效概念的理解,再图示说明:示意图DI-02,DI1 DI2正负限位的端子逻辑均被定义高电平输入有效。
P-OT=0时(NC信号未激发,OC=1),此时示意图DI-01右的Software的DI1的NC位取反为开路状态,导致“P-OT正向限位功能”=0,正向运行依然可以继续,当正向限位开关被激发(NC触点),此时示意图DI-02的DI1的OC=0了,示意图DI-01补充图的导致“P-OT正向限位功能”=1了,再不能朝正方向运行了,触发了正向运行的保护。另,由于种种原因导致了DI1信号线路的断开,驱动器立即判断成正向限位信号被触发了,正向运行不能进行,这样,安全事故就被提前遏制(N-OT反向极限雷同)。
注:高电平有效适用于急停、限位等安全功能,其核心优势在于:当线路断开时(OC=0),功能命令生效(禁止相关运动),从而把安全事故遏制在萌芽状态。
(三)与上位机硬件接线及有效电平
Part.3
DI 端子与上位机的接线需匹配上位机输类型(NPN/PNP),确保有效电平逻辑一致,具体接线方式如下:
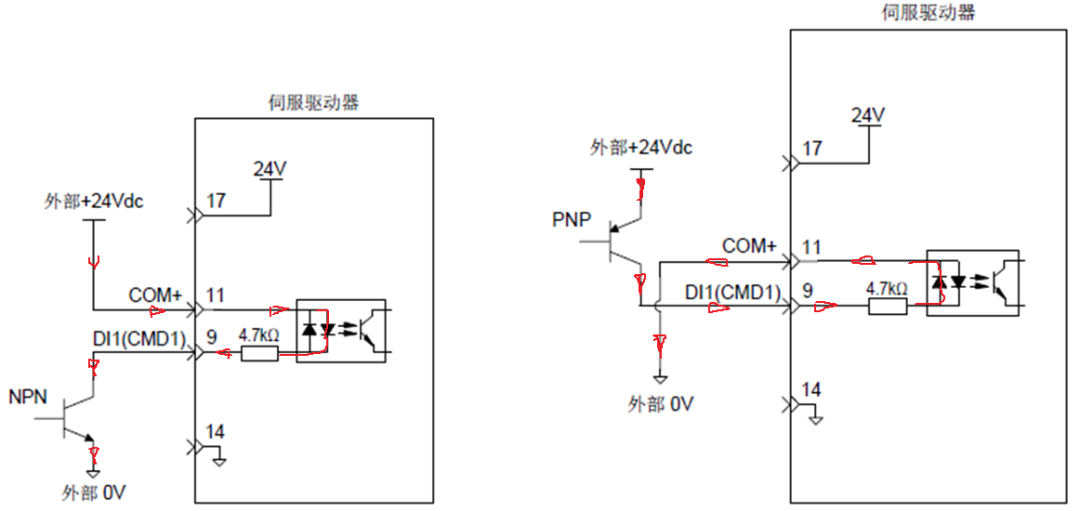
左:低电平输入有效 右:高电平输入有效
示意图DI - 03:DI 端子与上位机硬件接线图(参考点:0V,检验点:DI1 9#端子)
1:示意图DI-03左侧电路是与NPN输出的上位机的硬件接线,COM+11#端子连接电源的+24VDC,电流的流向顺序:
+24VDC→COM+ 11#端子→OC的右侧二极管→4.7KΩ→DI1 9#端子→NPN晶体管→0V
如果此时上位机NPN=0截止状态,9#端子电位是+24VDC,CMD(命令)=0,如果NPN=1导通,9#端子电位是0VDC,针对硬件OC,谓之低电平输入有效。
2:示意图DI-03右侧电路是与PNP输出的上位机的硬件接线,COM+11#端子连接电源的0VDC,电流的流向顺序:
+24VDC→PNP晶体管→DI1 9#端子→4.7KΩ→OC的左侧二极管→COM+ 11#端子→0V
如果此时上位机PNP=0截止状态,9#端子电位是0VDC,CMD(命令)=0,如果PNP=1导通,9#端子电位是+24VDC,针对硬件OC,谓之高电平输入有效。
注:硬件层面的 “高低电平有效” 是指端子电位状态(0VDC/+24VDC),与端子逻辑选择中的 “高低电平有效” 是 “硬件实现” 与 “功能定义” 的关系,极其容易混淆,务必特别留心区分。
伺服系统DO输出端子篇
一、 数字量输出DO端子的功能选择
Part.1
(一)功能定义
(上下滑动即可查看全表格)
| 西文 简称 |
西文 全名 |
功能 分类 |
功能 说明 |
应用 场景 |
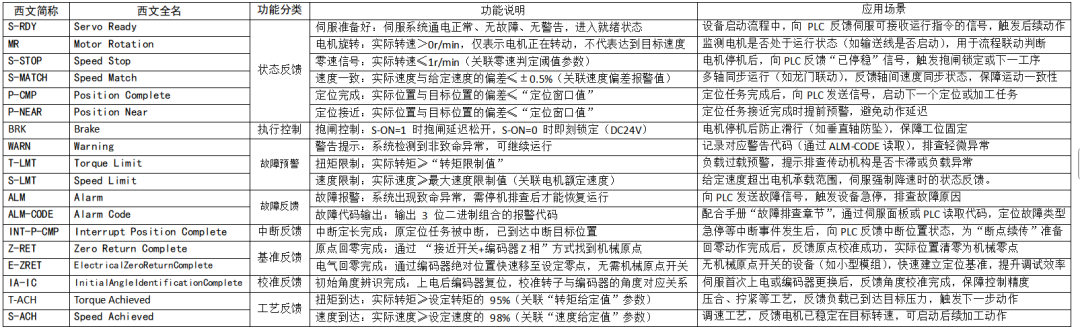
| S-RDY | Servo Ready | 状态反馈 | 伺服准备好:伺服系统通电正常、无故障、无警告,进入就绪状态 | 设备启动流程中,向PLC反馈伺服可接收运行指令的信号,触发后续动作 |
| MR | Motor Rotation | 电机旋转:实际转速>0r/min,仅表示电机正在转动,不代表达到目标速度 | 监测电机是否处于运行状态(如输送线是否启动),用于流程联动判断 | |
| S-STOP | Speed Stop | 零速信号:实际转速≤1r/min(关联零速判定阈值参数) | 电机停机后,向PLC反馈“已停稳”信号,触发抱闸锁定或下一工序 | |
| S-MATCH | Speed Match | 速度一致:实际速度与给定速度的偏差≤±0.5%(关联速度偏差报警值) | 多轴同步运行(如龙门联动),反馈轴间速度同步状态,保障运动一致性 | |
| P-CMP | Position Complete | 定位完成:实际位置与目标位置的偏差≤“定位窗口值” | 定位任务完成后,向PLC发送信号,启动下一个定位或加工任务 | |
| P-NEAR | Position Near | 定位接近:实际位置与目标位置的偏差≤“定位窗口值” | 定位任务接近完成时提前预警,避免动作延迟 | |
| BRK | Brake | 执行控制 | 抱闸控制:S-ON=1时抱闸延迟松开,S-ON=0时即刻锁定(DC24V) | 电机停机后防止滑行(如垂直轴防坠),保障工位固定 |
| WARN | Warning | 故障预警 | 警告提示:系统检测到非致命异常,可继续运行 | 记录对应警告代码(通过ALM-CODE读取),排查轻微异常 |
| T-LMT | Torque Limit | 扭矩限制:实际转矩≥“转矩限制值” | 负载过载预警,提示排查传动机构是否卡滞或负载异常 | |
| S-LMT | Speed Limit | 速度限制:实际速度≥最大速度限制值(关联电机额定速度) | 给定速度超出电机承载范围,伺服强制降速时的状态反馈。 | |
| ALM | Alarm | 故障反馈 | 故障报警:系统出现致命异常,需停机排查后才能恢复运行 | 向PLC发送故障信号,触发设备急停,排查故障原因 |
| ALM-CODE | Alarm Code | 故障代码输出:输出3位二进制组合的报警代码 | 配合手册“故障排查章节”,通过伺服面板或PLC读取代码,定位故障类型 | |
| INT-P-CMP | Interrupt Position Complete | 中断反馈 | 中断定长完成:原定位任务被中断,已到达中断目标位置 | 急停等中断事件发生后,向PLC反馈中断位置状态,为“断点续传”准备 |
| Z-RET | Zero Return Complete | 基准反馈 | 原点回零完成:通过 “接近开关+编码器Z相”方式找到机械原点 | 回零动作完成后,反馈原点校准成功,实际位置清零为机械零点 |
| E-ZRET | ElectricalZeroReturnComplete | 电气回零完成:通过编码器绝对位置快速移至设定零点,无需机械原点开关 | 无机械原点开关的设备(如小型模组),快速建立定位基准,提升调试效率 | |
| IA-IC | InitialAngleIdentificationComplete | 校准反馈 | 初始角度辨识完成:上电后编码器复位,校准转子与编码器的角度对应关系 | 伺服首次上电或编码器更换后,反馈角度校准完成,保障控制精度 |
| T-ACH | Torque Achieved | 工艺反馈 | 扭矩到达:实际转矩≥设定转矩的95%(关联“转矩给定值”参数) | 压合、拧紧等工艺,反馈负载已到达目标压力,触发下一步动作 |
| S-ACH | Speed Achieved | 速度到达:实际速度≥设定速度的98%(关联“速度给定值”参数) | 调速工艺,反馈电机已稳定在目标转速,可启动后续加工动作 |
由于表格内容实比较丰富也给大家截图方便观看,点击图片即可放大)
(二)逻辑输出选择
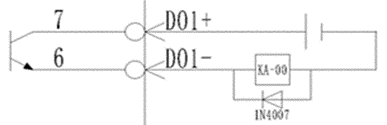
输出端子逻辑选择(参考所附示意图DO-01)
情况1:选择 “0-有效时输出L低电平(光耦导通)”
当DO定义的功能“为真”(如,伺服准备好)时:光耦导通→DO1端子的“DO1+”和“DO1-”之间相当于“短路”,万用表测量对应的端子6#7#,电压约为0VDC。
情况2:选择“1-有效时输出H高电平(光耦关断)”
当DO1定义的功能“为真”(如,伺服准备好)时:光耦关断→DO1端子的“DO1+”和“DO1-”之间相当于“开路”→万用表检测到对应的端子6#7#高电平信号
(因为两端没导通,电压差是外部电源的电压)。
注:西文简称可以作为伺服接线的线码管的标识信息
示意图DO-01
参考文献:
汇川技术IS620P系列伺服驱动器用户手册
GB/T 19939-2005,伺服系统通用技术条件 .
作者:黎赢璧。
- 随机文章
- 热门文章
- 热评文章
- 盛和资源51岁董事长辞职 下一站是中国地质科学院某研究所 副董事长暂代公司董事长职务
- 住房城乡建设部举办“人才成长面对面”第五期活动
- 如何以大规模设备更新促进县域医疗高质量发展?多名专家建言献策
- “朱氏内科疗法”非遗传人上海书展分享中医智慧
- 全国大型法医学术交流研究生首次担纲当主角成果亮眼
- 长江航道部门成功打捞枝江水道历史沉船
- 2024年“全国药品安全宣传周” 公众十大用药提示
- 北方地区多降水 南方地区高温持续
- 台风“摩羯”继续加强并向海南岛以东海面靠近
- 悟空“真身”亲自揭秘!
- 中秋假期旅客出行需求旺盛 铁路、民航以及口岸等增加运力满足旅客出行需求
- 糖尿病患者运动,这几点要注意 | 运动是良医
- 鱼桑古村解锁文旅“密码” 千年农遗绘就新“丰”景
- 1《汉口路上》:勾连今昔的上海“荡马路”指南
- 2京东 明星送好礼 完成随机任务领随机京豆
- 3京东 满1500减120元优惠券,Plus会员可领~
- 4大众ID.3和ID.4 X聪明款上市,售价12.9888万起
- 5先领券再剁手:建设银行0.99元购36元立减金!中国银行充话费立减4元!
- 6“凯里酸汤”长桌宴,一场美食文化之旅
- 7“穿越”三千年的探寻,殷墟商文明何以流量不止?
- 8冬季,糖尿病患者如何控好血糖?生活方式干预能替代药物治疗吗?| 时令节气与健康
- 92024全国青少年信息素养大赛总决赛圆满闭幕
- 10京东百亿补贴、深圳专享、PLUS会员:Xiaomi 小米 13 ultra 16GB+512GB 黑色 第二代骁龙8
- 11《直播营销服务指南》国际标准入选2025年服贸会《服务贸易标准化示范案例》
- 12商业贸促会与贸易发展与标准合作组织(ODCCN)举行工作会谈
- 13激光焊接机在焊接防水电机的工艺流程
- 1crocs 卡骆驰 Literide 360 儿童户外拖鞋
- 2HELLY HANSEN 哈雷汉森 Odin 男子弹力夹克
- 3CHINA TELECOM 中国电信 封神卡 20年29元月租(135G全国流量+100分钟通话+自主激活)
- 4玩模总动员:让火焰净化一切!HEX 炎魔之王拉格纳罗斯 1/6 雕像 开箱
- 5可carry亦可辅助的果岭风扇
- 6QCY H3 主动降噪头戴蓝牙耳机
- 7好吃的巧克力排行前十名?哪种人气最高好吃?
- 8兰空图床,这个图床工具牛大啦!10分钟快速部署。
- 9不锈钢锅发黑怎么办?涂点这个东西,擦一擦,瞬间光亮如新
- 10【咖啡】1000元以下15台半自动咖啡机云选购攻略
- 11电脑技巧:推荐一款非常棒的截图软件X-Snip,值得收藏!
- 12“穷鬼天堂”,这些家居品,换个思路买,省下一个亿
- 13一键生成!4款超火视频自动生成器,你值得拥有!